SkyZone SKY-01 FPV AIO Goggles – Discount – YouTube
Mission Planner 初期設定
クアッドST360に積んだ電脳HKPilot Mega V2.5の設定編。
とりあえず、最低限の設定のトコだけしか分からんので、細かいところは今後いじりながらボチボチと・・・。
パラメータの設定をするためのソフトの入手先。
ここは、ハード、ファーム、ソフトの3点セットを提供しているとこで、
ここにある、APM 2.5(今は2.6かな)のOEMなのか、パクりなのか・・・
HKPilot Mega V2.5はそれと同じハード。
なので、このAPMのファームやソフトを使う。
まずは、ここからソフトウェアのMission Plannerをする。
MissionPlannerのDownloadをクリックすると、保存するか実行するか効いてくるので、そのまま実行。
不安な時は、一旦、任意の場所に保存してウィルスチェックとかやってインストーラーを起動してインストールを始める。
Mission Planner Setup
インストーラーを起動するとセットアップが始まる。
ライセンス規約に同意
I accept the terms in the License Agreementに同意(チェック)してNextで次へ進む。
インストール先の指定
ソフトのインストール先を指定してNextで次へ進む。
インストール開始
Installをクリックして、インストールを開始する。
ちょろちょろと、インストールが進んでいくけど、初めてのインストールの時は、多分、途中でデバイスドライバのインストールウィザードが出るので、ドライバもインストールする。
インストール完了
全部インストールが終わるとCompleted画面がでるので、Finishをクリックしてインストールウィザードを終了する。
これで、Mission Plannerのインストールが完了。
スタートメニューのMission Planner Mav 1.0を起動すると、Mission Plannerが立ち上がるんやけど、
多分、初回目の起動時にはパラメーターの初期セットアップウィザードウィンドウがポップアップするので、
順番にセットアップする場合は”Yes”、あとでセットアップする場合は”No”を選んで次へ進む。
ここで”No”にしても、後からMission Plannerのメニューから全項目を個別に設定できる。
とりあえず、”Yes”を選んでウィザードを使って初期設定を行う。
設定項目は全部で16個。
1.機種の選択
Multirotorを選択してNextで次へ進む。
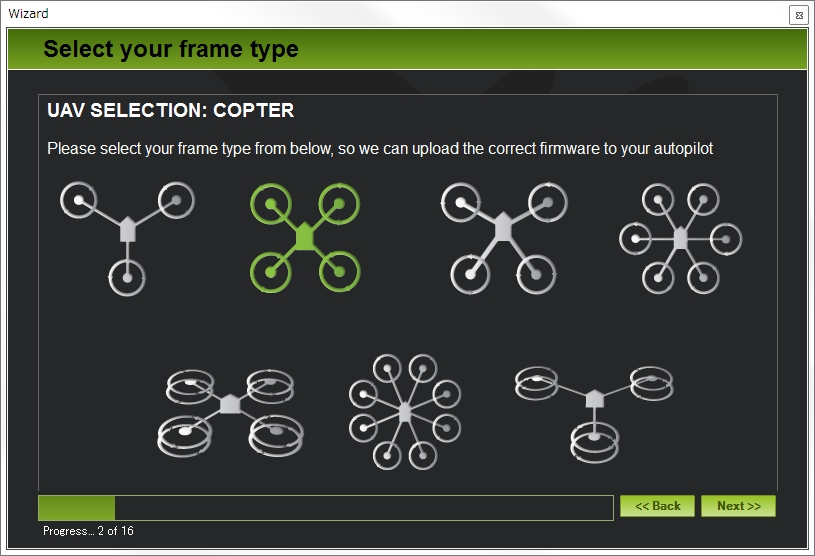
2.コプターの種類選択
今回のST360はクワッドのX(クロス)タイプを選んでNextで次へ。
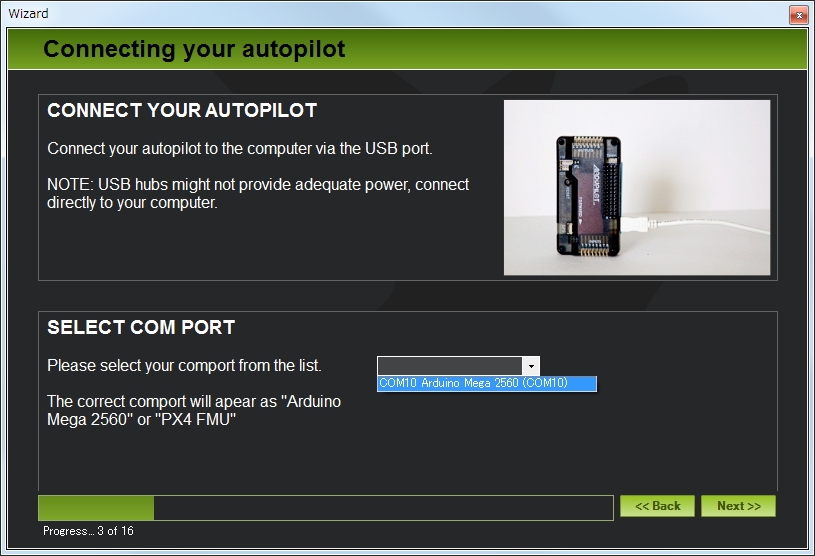
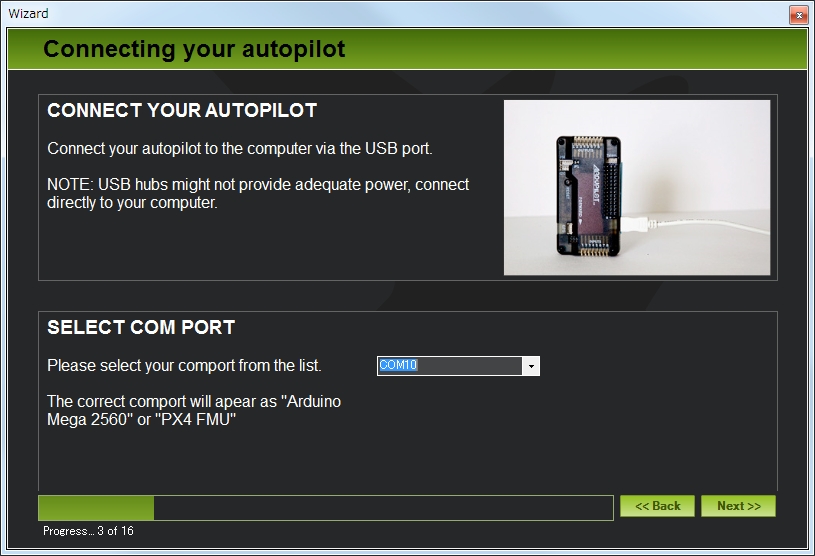
3.HKPilot Mega V2.5とPCをUSB接続
初めてUSBケーブルでHKPilot Mega V2.5とPCを接続するとUSBドライバのインストール画面がでるのでそのまま流れに身を任せてインストールを見守るw
SELECT COM PORTでプルダウンからPORTを選択してNextで次へ進む。
PORT番号は環境によって変わるので、自動的に表示されたPORTを選べば良いかな。
HKPilot Mega V2.5とPCがうまく接続されると、あれこれと読み込みの画面が出るので終わる迄待つ。
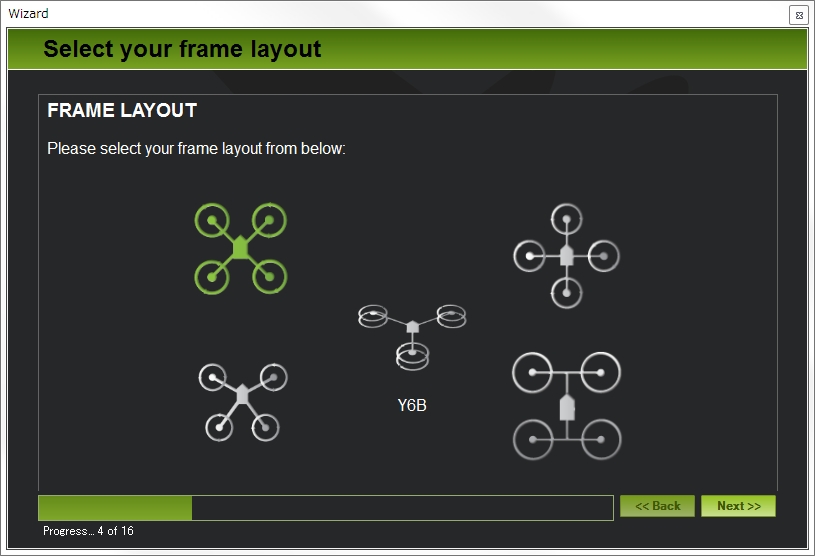
4.フレームレイアウト選択
機種選択でマルチコプターを選んだので、ここではマルチコプターのフレームタイプを選択設定する。
ST360はクワッドのクロスタイプを選ぶ
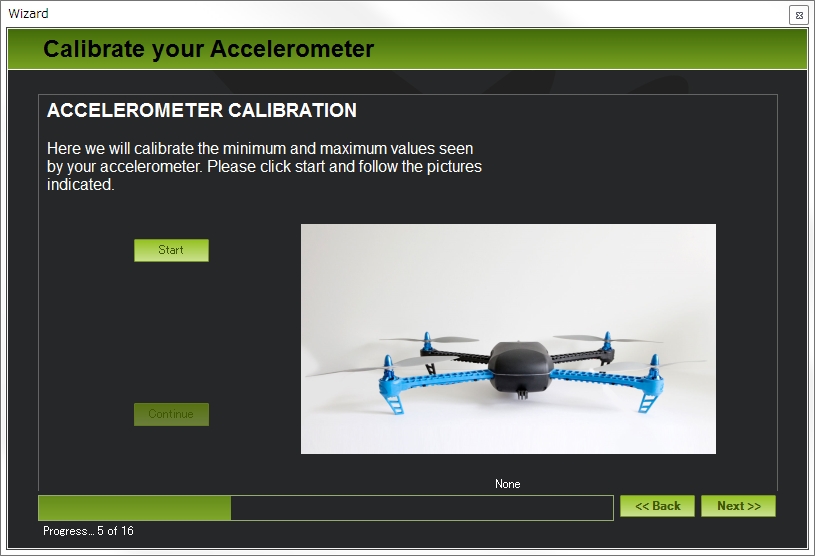
5.ACCELEROMETER CALIBRATION
加速度センサーのキャリブレーションをする。
詳細は後で説明するとして、とりあえずStartをクリックして進む。
7.Battery Monitor Configuration
とりあえず、3セル2200mAhを使うので2200を入力してNextで次へ進む。
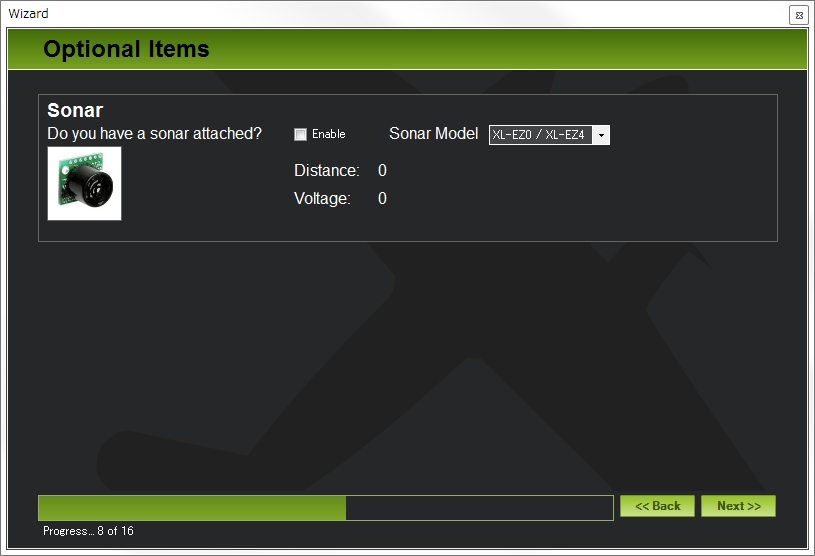
8.Optional Items
センサーは使ってないので何もせずNextで次へ進む。
ソナーセンサーを使う場合は、Enableにチェックを入れて、モデルを選択して進む。
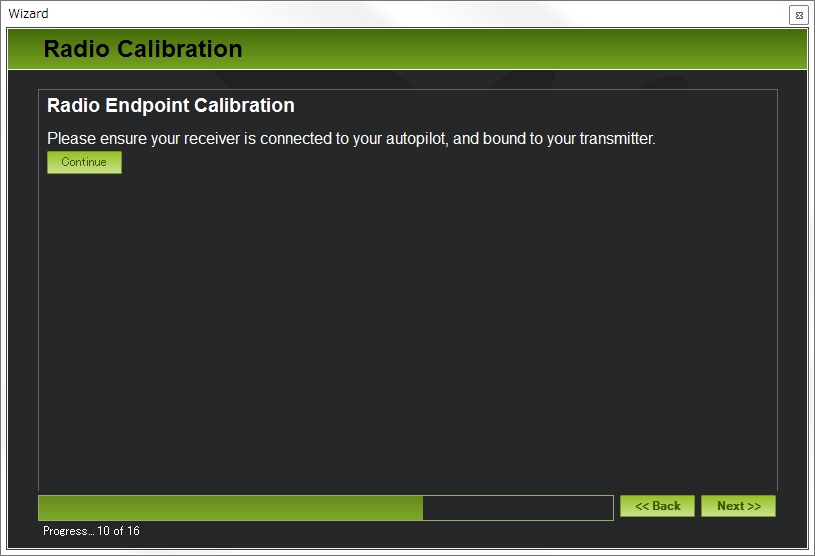
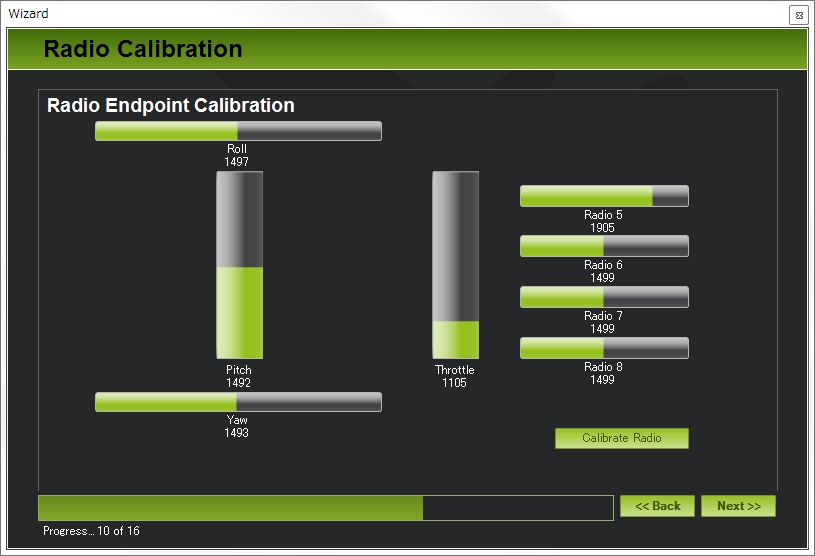
10.Radio Endpoint Calibration
プロポスティックのMAX可動範囲の設定をする。
Continueをクリックすると各チャンネルの表示がでるので、スティックやSWを動かして動きが合っているかをチェックする。
スティックを動かしてみて、逆に動く場合、プロポ側のリバースSWで動作方向を変更する。
ELEVATORはPitchのモニターで確認する。
ELEVATORだけは動きが逆になるのが正解。
キャリブレーションは画面内の”Calibrate Radio”をクリックして開始する。
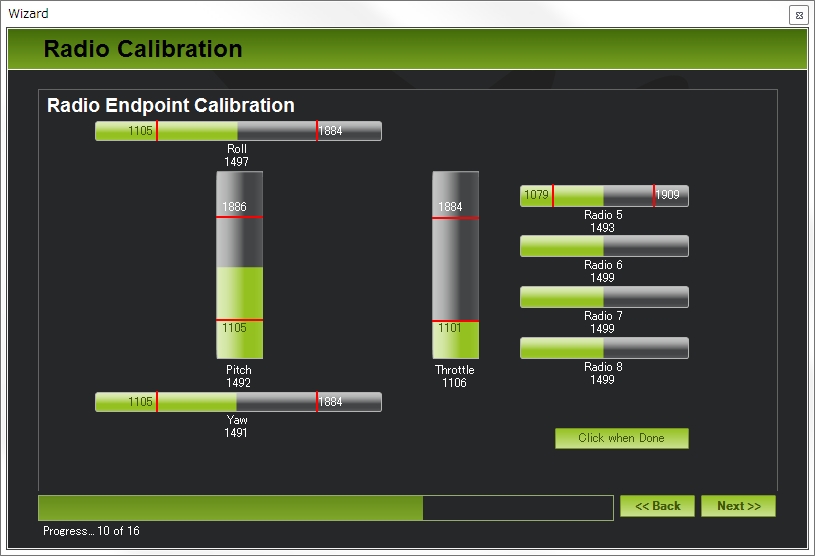
スティックやSWを動かすと、スティックの動く最大値が赤ラインと数値で表示される。
まぁ、良くあるパターンで左右のスティックをグリグリと円を描けば良いだけやねんけどw
あと、この画面ではRadio5にフライトモードSWを割り当てて、Radio6~8は使ってないねんけど、
このままではフライトモードは切り替えられるけど、GO HOMEが出来ない。つか、どれかのSWでGO HOMEになるようにせなアカン。
他にも色々な設定をSWで切り替えられるようにする為にも受信機のチャンネル数は多い方がエエらしい。
詳細はまた別途記事アップすることにして、スティックのキャリブレーションが終わったら、
画面内の”Click when Done”で設定を記憶させる。
11.Flight Modes
フライトモードの設定
俺の場合JRプロポのXG-8やねんけど、フライトモードの設定は
ST0:Stabilize(手動操作モード)
ST1:Loiter Simple Mode(GPSで定位置にホバするモード)
ST2:Auto Simple Mode(自動で飛行するモード)
に設定する。フライトモードSWを切り替えると、画面のプルダウンBOXの緑色が切り替わるので、SWのモードとその時の設定を確認する。
必須の設定は、Stabilize(手動操作モード)。
必ずSWのどこかに手動操作出来るモードを設定しておかないと、エライことになる気がするw
どっかに飛んで行っても全く手で操作できへん!みたいなw
まぁまずは機体が安定フライト出来るかどうかを見る所からなので、最初はStabilize(手動操作モード)だけでもエエくらいやなw
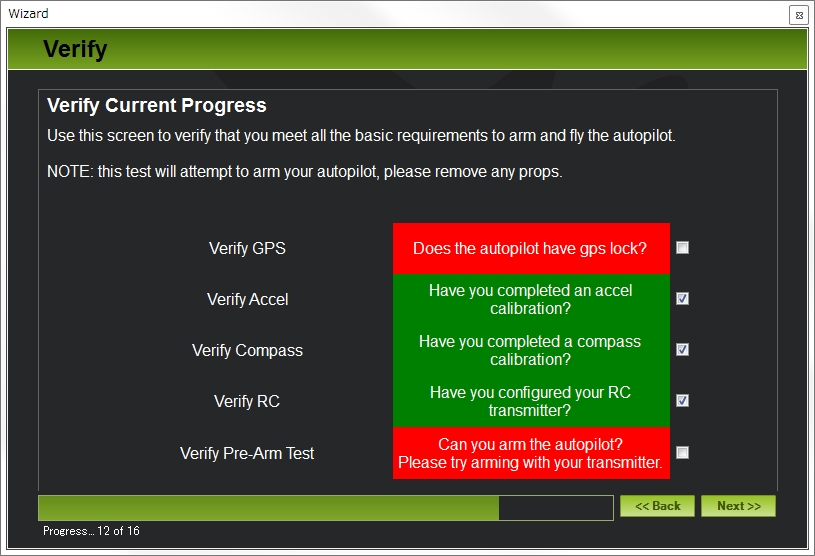
12.Verify
そのままNextで次へ進む。
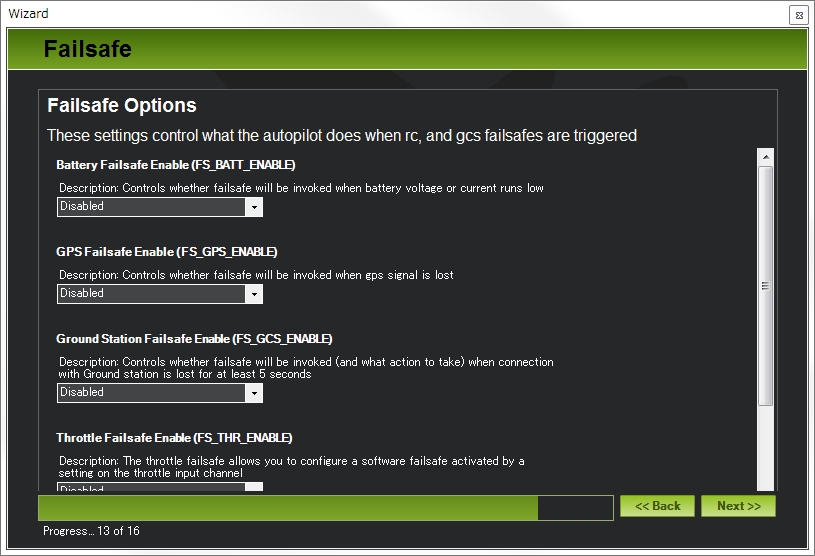
13.Failsafe
とりあえずそのままNextで次へ進む。
このFailsafeは設定しといた方が良いと思うので詳細はまた別記事でアップする。
色々な設定が出来るらしい。
例えば、電波が届かなくなってバインドが切れた場合、自動的にGO HOMEさせて自立飛行で離陸地点に戻ってこさしたり・・・
ま、そんな、ヤバい時の動きを設定する項目やね。
14.GeoFence
ここも、とりあえずそのままNextで次へ進む。
15.Dont Forget!!
なんか分からんけどお役立ちリンクw
“Finish”ボタンで初期設定ウィザードが終了
Mission PlannerのFLIGHT DATA画面が表示される。
キャリブレーションが出来てたら、機体を動かしてみるとその動きに合わせて、画面が動く。
この画像だと、水平の赤ラインが0(地平線)に合ってないので、キャリブレーションがずれている。
キャリブレーションでゼロ調ができると大体こんな感じになる。